
On this page I’m writing up a few notes and facts about the parts that will ultimately (I hope!) be part of a fully functioning Active Cruise Control fitted to my Caponord ETV1000 Rally-Raid. To start the ball rolling (1st June 2014) here’s a little tech-info about the servo unit and its operation. Whether I use this unit or not remains to be seen, but for now it’s a starting point and a useful tool to help learn stepper motor control.
Incidently, it also looks (from internet photos) that this unit is also used on the Subaru Imprezza WRX!
Honda GL1800 Cruise Control Servo unit – Electrical
 The unit itself is approx. 115mm x 114mm x 52mm in size (less the cable) with a maximum length including the cable gland of 160mm. It weighs in at approx. 750g (0.75Kg).
The unit itself is approx. 115mm x 114mm x 52mm in size (less the cable) with a maximum length including the cable gland of 160mm. It weighs in at approx. 750g (0.75Kg).
It is a sealed unit, however the sealing lip can easily be removed with a Dremel after which the rear case and seal lift away. This will allow the cable assembly to be replaced with one specific for the Caponord.
Electrically, it has a 6 pin connector – 2 pins for the clutch and 4 for the stepper motor – a variable reluctance 12v unit. The resistance specifications (Honda) for the pins are:
- Pins 3 – 6 (clutch 35-45Ω) ….. 42Ω measured
- Pin 1 to pin 2, 4 or 5 (motor windings – 3-7Ω each) ….. 6.2Ω measured
From this I can get some other useful numbers ….. (Volts = Amps * Resistance):
- Clutch @ 12v – 0.32A
- Motor @ 12v – 1.94A per phase
As mentioned, it uses a variable reluctance stepper motor, a 12v power line feeds to each pair of coils and a transistor or in this case FET is used to ground each phase in sequence – this causes the motor to drive. Here’s an image that may better explain the motor operation.
In this case ‘C’ is the bikes 12v power and ‘1’, ‘2’ and ‘3’ are grounded in sequence to rotate the motor, to reverse the rotation, simply reverse the sequence of switching – 3,2,1. Due to the current rating I’ll probably use IRL540 FET’s as they are a direct 5v TTL switchable device and well suited to use with the Arduino. Here’s how each phase is switched.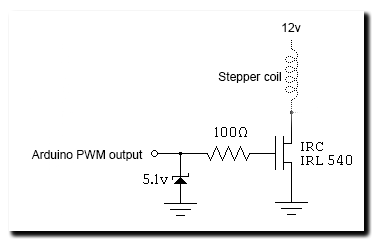
So to control this motor requires three pulses for one revolution and with the cable cam moved full-deflection, which is approximately 15.7 revolutions of the motor. So to keep things simple to start with, let’s think about the cable moving FSD in 1 second.
1 second / (15.7 revolutions x 3 phases) = 47.1Hz = 21ms (pulse 7ms each @ 33.3% duty cycle)
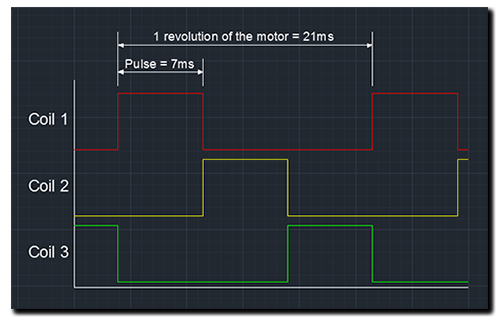
So by setting 3 Arduinio outputs to deliver a 47Hz signal with a 33.3% duty cycle and phased 120º apart …. I should have drive, in direction at least!
Honda GL1800 Cruise Control Servo unit – Mechanical
Using three intermediary gears between the motor and clutch with a high overall ration means that the motor windings can be shut down once the motor has reached its required position. In other words, any torque applied at the clutch will be insufficient to rotate the motor.
- Overall gearing ratio is 62.8/1
- Angular change of 0.955º/step at the clutch gear
- Maximum cable travel is 35mm with a cam rotation of approx. 89º
- Resolution = approx. 0.38mm of cable travel per motor step.
 The clutch isn’t a true friction-clutch in the way I would expect – energising it does not lock it in position instantly, instead it appears to engage three locks. Once energised the clutch gear will continue to rotate anything up to approx. 120º before reaching the next lock, where it engages and drive is then transferred to the cam/cable.
The clutch isn’t a true friction-clutch in the way I would expect – energising it does not lock it in position instantly, instead it appears to engage three locks. Once energised the clutch gear will continue to rotate anything up to approx. 120º before reaching the next lock, where it engages and drive is then transferred to the cam/cable. 
When the power supply is removed, the clutch disengages instantly and the cam return spring (large rotary spring in the photographs) then ensures that the cable tension to the throttle body is released – the servo unit now has no influence over throttle position.